Sponge enables robot to crack the egg challenge
11 Jun 2023
Robots have demonstrated their efficiency over the human and manual approach in many areas but still struggle to match the fine motor skills of people when handling, say, an egg.
But now the more nuanced human touch – variable stiffness – that can be employed so easily for manipulating delicate items has found an imitator, thanks to the use of a simple sponge.
Lead author, Bristol University Department of Engineering Mathematics’ Tianqi Yue has published the results of a study at the Institute of Electrical and Electronics Engineers (IEEE) International Conference on Robotics and Automation (ICRA) 2023, entitled ‘A Silicone-sponge-based Variable-stiffness Device’.
“Robotic arms are too rigid so they cannot make such a soft human-like grasp on delicate objects, for example, an egg. What makes humans different from robotic arms is that we have soft tissues enclosing rigid bones, which act as a natural mitigating mechanism,” explained Yue.
“We managed to develop a soft device with variable stiffness, to be mounted on the end robotic arm for making the robot-object contact safe.”
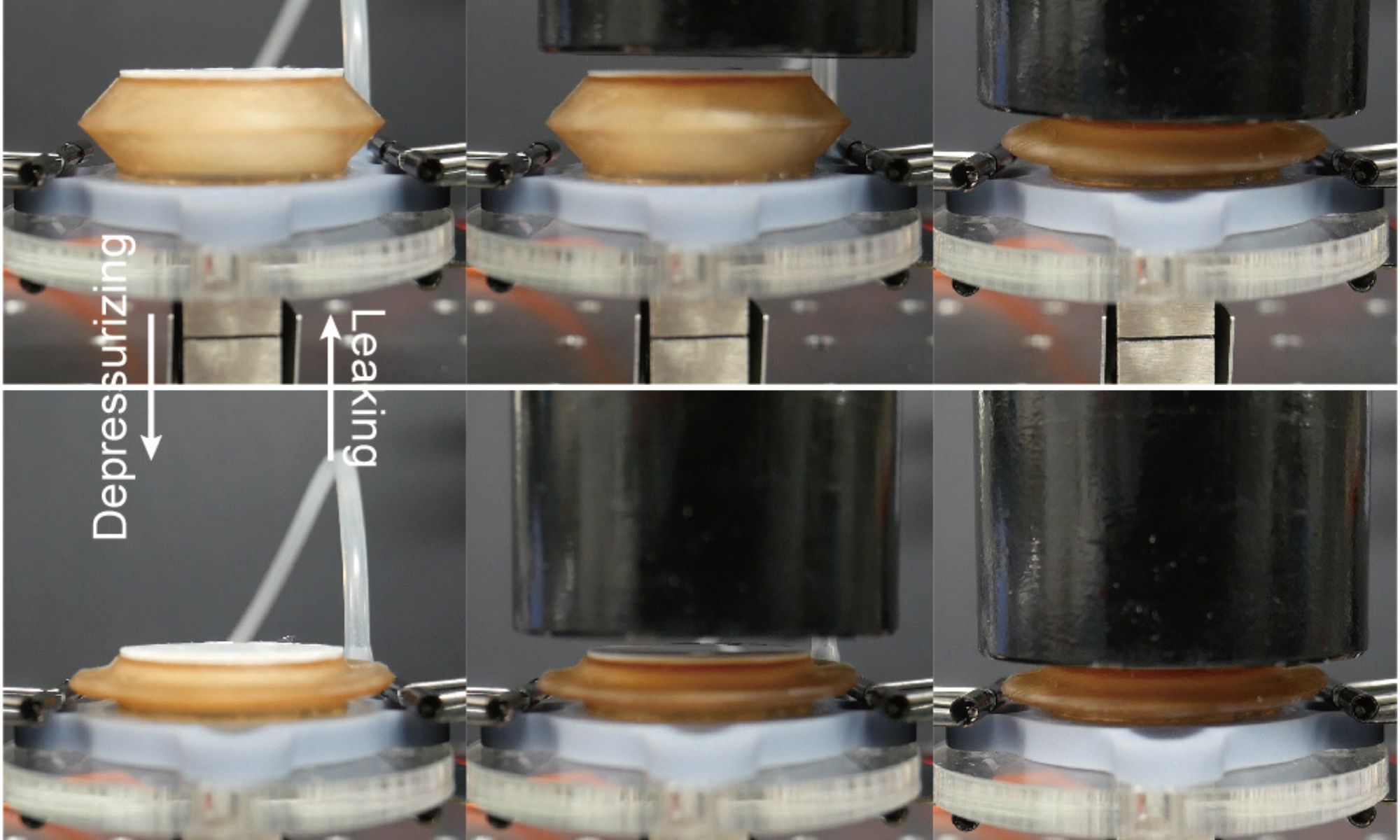
The technique employed silicone sponge, a porous elastomer that stiffens upon being squeezed transforming it into a so-called variable-stiffness device.
This device offers benefits for use with industrial robots gripping fragile substances such as jellies or eggs and could enable safer human-robot interaction.
Yue stated: “We managed to use a sponge to make a cheap and nimble but effective device that can help robots achieve soft contact with objects. The great potential comes from its low cost and light weight.
“We believe this silicone-sponge based variable-stiffness device will provide a novel solution in industry and healthcare, for example, tunable-stiffness requirement on robotic polishing and ultrasound imaging.”
The Bristol team now intends to refine its work to enable variable stiffness in robots when working in multiple directions, notably involving rotation.
